Case study: Flying drone DIY
Intro
A week ago I worked on the project which aim was to build a drone from ordered accessories and write own or flash existing firmware. It was not a project for a potential customer, but research's milestone results and gained expertise might be interesting for my readers.
Discovery
It was a new domain for me and, at the first, the project required a R&D phase. At the discovery phase we have to answer a set of questions necessary to the success of the project. This questions had been stated in the online document and the tech doc had been shared with the group. When key questions had been answered, a picture of what should be done became more or less clear. The next step should be to launch a pilot project to check the result of the research.
Solution
Firmware
Market analysis shown a variety of different existing solutions. The most
promising was the Ardupilot.
Ardupilot supports
a quite big set of hardware suppliers, may be they even have
some kind of partnership agreement. In case project would have new requirements
to the hardware which outscope officially supported by the Ardupilot,
existing Ardupilot codebase could be a good starting point to make a fork and
write our own customised firmware version.
The market also has other systems and solutions. Of course, it is also possible to
write our drone's firmware from scratch, but it will require an order of magnitude
more resources, that's why to check existing solutions at first is important.
Hardware
The most important part of drone hardware is a pilot controller. Ardupilot supports
many models, but at this stage CUBE orange was checked
Reference on the sample at the aliexpress.
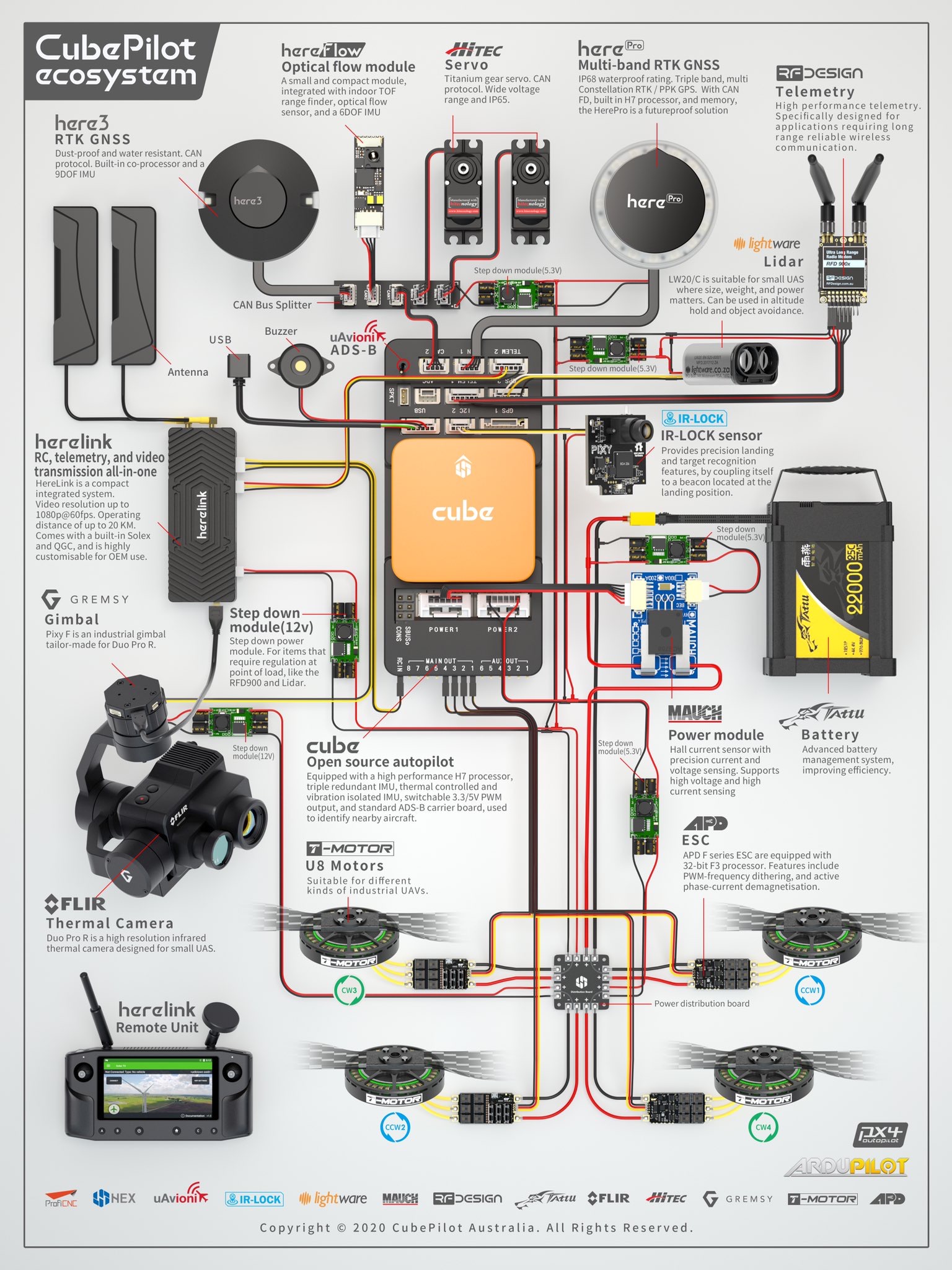
On the image below the rest of drone's components are shown (CUBE compatible, one of the options)
The problem of compatibility of the flight controller and the Remote Controll (radio transmitter directly in the hands)
Research phase revealed RC usually developed for specific drone and supplied by manufacturer.
There is a cross-compatibility issue. However, the main problem is in the frequency and protocol
used. According to the discussions, multi-protocol controllers are compatible with a large number
of flight controllers / drones.
Althought top drone's models on the market has extra layers of security to prevent
hijacking and some other issues.
This issue requires extra research, but at this stage we could go further with
multi-protocol support radio controller like
TX16S Hall Radio Controller
Post Scriptum
Research phase helped to rised up and clarified questions to build a drone. The next pilot phase should help to verify assumptions and come to production ready solution. At this moment the further work has been hold on due the decisions to go at first by the different way. The current tech doc is avaialble by link.
A few related posts:
Flying Drone DIY, part V: custom autopilot programs -- improving computer vision of drone
Flying Drone DIY, Part IV: custom autopilot programs
Flying Drone DIY, Part III: Assembling and Tuning
Flying drone DIY, part II: configuration for the 1st version